The laboratory
experimental setup "Tandem Pendulum" contains the
technical realization of an unstable, complex plant together
with an actuator and a digital controller. The digital
controller realizes an observer based state feedback or a
fuzzy controller. The laboratory setup is based on the plant
"Position Control PS600".
The basic system includes an actuator as well as the
mechanical setup (PS600) with a premounted
tandem pendulum extansion kit (Option 600-40).
The documentation contains the instructions for start-up as
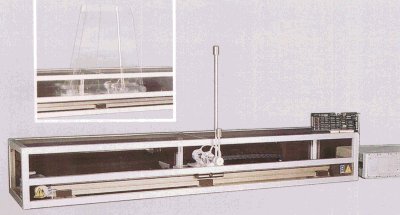
well as the technical data of the system. The plant is
represented by two revolving pendulums with different
lengths mounted on top of a moving base. One pendulum
(length 50 cm) is mounted on a sleeve shaft. An inner shaft
is fixed to the second pendulum (length 10 cm). Both
pendulums are pivoted inde- pendently from each other. By a
DC-motor, a toothwheel, a toothbelt and a clutch, the moving
base can be driven along a guiding bar over a length of
approximately 1.5m such that both pendulums are stabilized
in upright positions at a preassigned position. The
stabilization of the pendulums is accomplished by a digital
controller. Based on measurements, the controller generates
a suitable signal which controls the DC-motor by an
electronic drive. The measurements are the pendulum angles
and the cart position obtained by incremental encoders.
The standard digital control of the basic system consists
of a PC adapter card Option 600-03 for an ISA slot
and an executable controller program (MS-Windows) Option
600-42. The adapter card as well as the program require
an IBM-AT-compatible PC. The controller program (Win 3.1/Win
95) is driven by pull-down menus. The control algorithm
realizes a state feedback with estimation of the
|
angular velocities of the pendulums and the speed of the
cart as well as a disturbance observer to compensate the
effects of the friction. The friction compensation force
acts on the bearing of the cart. All of the controller and
observer parameters are comfortable adjustable. The
controller performance is examined by recording the
measurements and observed signals of the system. The graphic
ouput of recorded data may be sent to a window. Its content
may be printed, saved as a WMF file or copied into the
clipboard. The documentation is extended by the program
operation and the theoretical background with the
mathematical model of the plant.
Additional options extend the version of the laboratory
setup described above to support research studies in the
field of arbitrary control algorithms or applied fault
detection methods. For this purpose an additional fuzzy
controller and the 'C++' source files of the programs are
available.
The Option 600-43 extends the executable
program (Option 600-42) by a fuzzy controller including
modules to define fuzzy rules and membership functions, to
store and load a corresponding description file and to
display a graphic representation of the fuzzy knowledge
base. The fuzzy controller uses the fuzzy knowledge base to
realize a cascaded control structure. The documentation is
extended by the background of a fuzzy controller and the
operating instructions. Switching between the controller
modes allows for control performance comparison of state
controller and the fuzzy controller.
The Option 600-45 contains the C++/Pascal source
files of the PC controller program including library
functions for fuzzy operations and graphic output. With this
option the user is able to implement special algorithms for
control, supervision or fault detection in the frame of the
menu-driven program. The Borland C++ compiler version 4.52
as well as Delphi V1.0 are required to generate an
executable program.
Technical data are subject to change (Date
15-April-1999)
|