Kurzbeschreibung :
Laborversuch PS600 Regelung eines Tandem-Pendels
| Der Laborversuch "Tandem-Pendel"
beinhaltet die technische Realisierung einer instabilen, komplexen Regelstrecke mit
zugehörigem Stellglied und einem digitalen Regler. Der digitale Regler realisiert eine
beobachtergestützte Zustandsrückkopplung oder einen Fuzzy-Regler. Der Versuch basiert
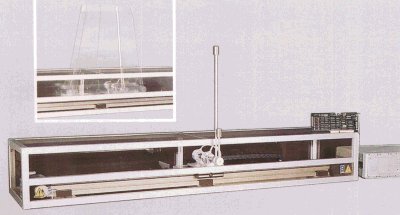
auf dem Laborversuch "Positionierstrecke PS600". Das Grundsystem beinhaltet ein Stellglied sowie die Mechanik (PS600) mit dem vormontierten Aufrüstsatz der Tandem-Pendelmechanik (Opt. 600-40). Die Dokumentation enthält die Inbetriebnahme und die technischen Daten des Systems. Die instabile Regelstrecke besteht aus zwei parallelen Pendeln, unterschiedlicher Länge, die auf einem Wagen drehbar montiert sind. Auf einer Hohlwelle ist ein Pendel (Länge 50 cm) befestigt. Ein zweites Pendel (Länge 10 cm) ist an der innenliegenden Welle montiert. Beide Wellen sind unabhängig voneinander drehbar gelagert. Der Wagen wird entlang einer Führungsstange auf einer Länge von ca. 1,5 m über einen Zahnriemen, eine Zahnscheibe und eine Kupplung von einem Gleichstrommotor angetrieben, so da?beide Pendel in aufrechter Lage an einem vorgebbaren Ort stabilisiert werden können. Die Stabilisierung der Pendel wird dadurch erreicht, da?ein digitaler Regler aus den Meßgrößen ein Stellsignal erzeugt, das den Gleichstrommotor über ein elektronisches Stellglied geeignet ansteuert. Als Meßgrößen werden jeweils über Inkremental-Encoder die Winkel der Pendel und die Position des Wagens ermittelt. Zur Regelung der beschriebenen Strecke ist ein PC-Programm für MS-WINDOWS (Opt. 600-42) zusammen mit einer PC-Einsteckkarte (Opt. 600-03) für einen ISA-Steckplatz verfügbar. Das Programm setzt einen IBM-AT-kompatiblen PC voraus. Das implementierte Programm (Win 3.1/Win 95) erlaubt eine menügestützte Bedienung des Laborversuchs. Der Regelalgorithmus beinhaltet eine
|
Zustandsvektorrückführung mit Schätzung der Winkelgeschwindigkeiten der Pendel und der Geschwindigkeit des Wagens sowie einen Störgrößenbeobachter zur Schätzung und Unterdrückung der Effekte der Reibung. Die daraus gewonnene Kompensationskraft für die Reibung greift an der Lagerung des Wagens an. Der Regelalgorithmus ist vollständig parametrisierbar. Die grafische Ausgabe von Meßwerten erfolgt in ein Fenster, dessen Inhalt gedruckt, als WMF-Format gespeichert oder in die Zwischenablage kopiert werden kann.
Die Dokumentation wird erweitert um die Programmbedienung, den theoretischen Hintergrund und das mathematische Modell der Regelstrecke. Durch zusätzliche Optionen ist die Standardversion des Laborversuchs so erweiterbar, da?das System "Tandem-Pendel" als realer Proze?für wissenschaftliche Untersuchungen verwendet werden kann, beispielsweise für den Test beliebiger Regelalgorithmen oder Fehlererkennungsverfahren. Dazu werden zusätzlich eine Fuzzy-Regelung und die 'C++' Sourcen der Software angeboten. Die Option 600-43 ergänzt das ausführbare Programm der Option 600-42 um einen Fuzzy-Regler, sowie ein Modul zur Definition von Regeln und Zugehörigkeitsfunktionen, Abspeicherung und grafischen Ausgabe der resultierenden Fuzzy-Wissensbasis. Der Fuzzy-Regler verwendet die abgespeicherte Fuzzy-Wissensbasis zur Kaskaden-Regelung. Die Dokumentation wird erweitert um die Grundlagen des Fuzzy-Reglers und die Bedienungsanleitung. Somit ist es möglich, die Regelgüte von Zustandsregler und Fuzzy-Regler miteinander zu vergleichen. Die Option 600-45 beinhaltet den C++/Pascal-Quellcode des PC-Reglerprogramms mit Bibliotheksroutinen für Fuzzy-Operationen und der grafischen Ausgabe. Der Anwender kann damit spezielle Algorithmen zur Regelung, Überwachung oder Fehlererkennung selbst programmieren. Der Borland-C++ Compiler Version 4.52 sowie Delphi V1.0 sind hierzu erforderlich. |