Kurzbeschreibung:
Laborversuch MA401 Magnetische Aufhängung
| Der
Laborversuch "Magnetische Aufhängung MA401"
verkörpert die technische Realisierung eines
nichtlinearen instabilen Eingrößensystems. Es besteht
aus einem frei schwebenden Metallkörper und einem
Elektromagneten als Stellglied und umfassender
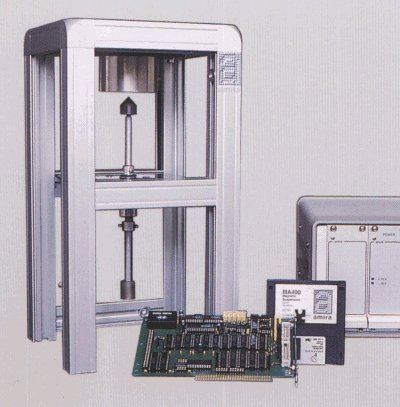
Reglerelektronik. Die nichtlineare, instabile Regelstrecke ist ein freischwebender Metallkörper, welcher an der höchsten Stelle durch einen Elektromagneten gehalten wird. Die Metallkörperposition, die dem Abstand zwischen Körper und Magnet entspricht, wird mit einem induktiven Wegsensor (LVDT) erfaßt und als Istwert dem Regler zugeführt. Der Regler gibt das Stellsignal an das Stellglied weiter, welches dann die gewünschte Positionsänderung bewirkt. Die Sollposition kann im Bereich von 0-5mm variiert werden.  In der Standardversion wird das Laborgerät MA401 mit einem speziellen analogen Regler angeboten. Der analoge Regler ist als Operationsverstärkerschaltung zusammen mit der nötigen Elektronik in einem 19"- Gehäuse integriert. Mit dem Standardgerät können regelungstechnische Grundlagen demonstriert werden. So läßt sich zeigen, daß die instabile Strecke bei Verwendung eines geeigneten Reglers in ein stabiles System übergeht. Weiterhin kann der Einfluß der Regelparameter auf das Streckenverhalten (Stör- und Sollwert-Sprungantwort) anschaulich dargestellt werden. Systemgrößen wie Position, externes Stellsignal, Spulenstrom und analoger Sollwert können direkt an Meßausgängen abgegriffen werden. Da zusätzlich das Stellsignal umgeschaltet werden kann, ist ein beliebiger externer Regler, z.B. Analogrechner oder PC mit A/D-D/A-Wandlerkarte, anschließbar. |
Das Laborgerät MA401 ist
somit für die Lehre und Demonstrationszwecke in allen
Bereichen der Regelungstechnik geeignet. Die
Dokumentation enthält die Inbetriebnahme, den
theoretischen Hintergrund und die Systembeschreibung mit
dem mathematischen Modell sowie die technischen Daten. Alternativ zum eingebauten analogen Regler wird mit der Option 401-02 eine PC-Version angeboten. Sie beinhaltet eine A/D-D/A-Wandlerkarte sowie ein ausführbares Reglerprogramm für einen IBM-AT-kompatiblen PC mit ISA-Steckplatz und dem Betriebssystem MS-DOS. Das Reglerprogramm stellt drei verschiedene Reglerversionen zur Verfügung, einen PIDT-Regler, einen Fuzzy-Regler mit Lookup-Table und einen Fuzzy-Regler, der eine aus einer Fuzzy-Beschreibungsdatei erzeugte Wissensbasis verwendet. Alle Parameter, die Beschreibungsdatei, die Sollwerte und die Meßwerterfassung einschließlich der Streckenidentifikation sind über Menüs komfortable vorgebbar (Turbo-Vision Oberfläche von Borland). Die grafische Ausgabe von Meßwerten erfolgt auf einem Bildschirm, in eine Datei, auf einen HP-kompatiblen Plotter mit serieller Schnittstelle oder auf einen Epson-kompatiblen Matrixdrucker. Zusätzlich erlaubt das Programm, die eingestellten und gemessenen Strecken- und Reglerparameter in einer Datei zu speichern (ASCII-Format). Der enthaltene Praktikumsversuch wird mit analogen sowie digitalen PID-Reglern durchgeführt. Die Stabilitätsuntersuchungen basieren auf dem Wurzelortskurvenverfahren und dem Bodediagramm. In dem Versuch wird der Einfluß der Reglerparameter auf das Verhalten des geschlossenen Regelkreises untersucht. Die Dokumentation wird um die Grundlagen des Fuzzy- und PIDT-Reglers, die Programmbedienung sowie die Anleitung des Praktikumsversuchs mit Musterlösungen erweitert. Die Option 401-03 umfaßt den C++-Quellcode für das oben erwähnte PC-Reglerprogramm mit Bibliotheksroutinen für die grafische Ausgabe und die Fuzzy-Operationen. Der Anwender kann damit spezielle Algorithmen zur Regelung selbst programmieren. Der Borland C++ Compiler mit der Turbo-Vision-Bibliothek ist erforderlich. Technische Änderungen vorbehalten (Stand 27.5.1998) |