Kurzbeschreibung:
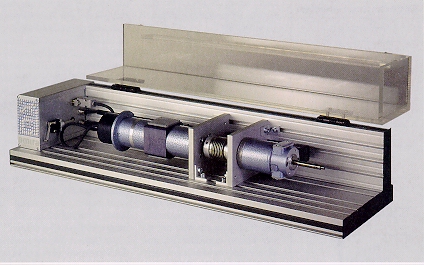
Laborversuch DR300 Drehzahlregelung mit variabler Last
| Der Laborversuch "Drehzahlregelung mit
variabler Last" beinhaltet die Realisierung eines nichtlinearen Eingrößensystems
mit zugehörigem Stellglied, Sensoren, Meßausgängen und der Anschlußmöglichkeit
verschiedener Regler. Die Regelstrecke besteht aus einem permanent erregten Gleichstrommotor (M1), dessen Eingangsgröße (Ankerstrom) büer einen unterlagerten Stromregelkreis vorgegeben werden kann. Seine Leistungsendstufe arbeitet im 4-Quadrantenbetrieb. Als Sensoren für die Ausgangsgröße (Drehzahl) sind ein Tachogenerator (T) und ein Inkrementaldrehgeber (I) montiert. Das freie Wellenende des Motors ist über eine Kupplung (K) mit der eines zweiten identischen Motors (M2) starr verbunden. Dieser wird als Generator betrieben. Sein Ausgangsstrom ist frei einstellbar. Das zweite Wellenende des Generators kann zur Befestigung einer zusätzlichen Schwungmasse verwendet werden. Die Motoren sind auf einer Plattform aus Aluminiumprofilen montiert. Das System ist komplett verdrahtet und wird mit nur einer Steckverbindung an die entsprechende Elektronik angeschlossen. Die Motoren und alle sich drehenden Teile werden von einer transparenten, aufklappbaren Acrylglashaube verdeckt.  In der Grundversion gehört zu dem System DR300 neben dem mechanischen Aufbau ein 19"-Tischgehäuse. In diesem befinden sich die als Stromregler ausgeführten Stellglieder für Motor und Generator, die Signalanpassung, Netzteile und ein Modul mit Meßausgängen. Eine ausführliche Dokumentation des Systems gehört ebenfalls zum Lieferumfang. Die Option 300-01 erweitert das System um einen analogen PI-Regler, der in dem Tischgehäuse integriert ist. Der Drehzahlsollwert des Motors und der Laststrom des Generators sind durch Einspeisung von Gleichspannungen im Bereich +/-10 Volt über BNC-Buchsen einstellbar. Der Istwert für den Regler ist das gemessene Tachosignal. P- und I- Anteil des Reglers werden über Koeffizientenpotentiometer eingestellt. |
Die Option 300-02 erweitert die Grundversion des DR300 um
eine Einsteckkarte für einen IBM-AT-kompatiblen PC. Sie verfügt über A/D-D/A-Wandler,
digitale I/O- Kanäle und einen zusätzlichen Inkrementalgebereingang. Der zugehörige
Praktikumsversuch "PI-Drehzahlregelung" befaßt sich mit Einstellvorschriften
für PI- Regler nach BODE-Diagramm, Betrags- und Symmetrischem-Optimum unter Verwendung
der im Versuch ermittelten Streckenparameter. Das PC-Programm wird mit einer Mouse
und/oder Tastatur über Pulldown- Menüs gesteuert (Turbo-Vision Oberfläche von Borland).
Es ermöglicht eine komfortable Identifikation der Streckenparameter durch Aufnahme von
Sprungantworten des offenen Regelkreises. Zur Regelung des Systems ist ein PI-Regler
implementiert, dessen Parameter online geändert werden können. Die Güte der Regelung
bezüglich Führungs- und Störverhalten kann durch Aufnahme der Systemantwort auf
Führungs- und Störgrößenänderungen beurteilt werden. Die Signalverläufe der
Eingangsgrößen sind als periodische Funktionen einstellbar. Zur Auswertung der Messungen
können diese als Grafik auf dem Bildschirm des PC's angezeigt und auf einem Plotter oder
Drucker ausgegeben werden. Das Programm ermöglicht die Speicherung der eingestellten bzw.
ermittelten Strecken- und Reglerparameter als ASCII-File. Diese Daten können später
wieder geladen werden. |