Brief Description:
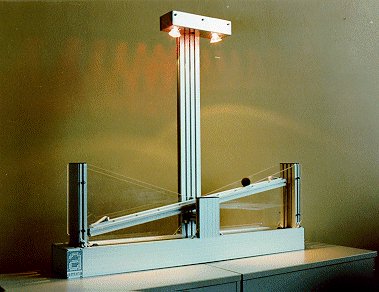
Laboratory experiment BW500 Ball and Beam
| The laboratory experimental setup "Ball and
Beam" contains the technical realization of a nonlinear plant together with an
actuator and a digital controller using observer based state feedback. The nonlinear plant is represented by a ball laying on a beam with an adjustable angle. The ball can roll upon the beam within a distance of 1m. By a toothbelt, a toothwheel and a clutch mounted on the shaft of a DC-motor the beam can be driven such that the ball is stabilized at a preassigned position. The stabilization of the ball is accomplished by a digital controller. Based on measurements, the controller generates a suitable signal which controls the DC-motor by an electronic servo amplifier. The measurements are the angle of the beam obtained by an incremental encoder and the ball position obtained by a CCD-camera. The system is ready to operate after connecting to the electronic actuator. All the moving parts are covered by transparent plexiglass.  In a standard version the experimental setup BW500 includes the mechanical setup as well as a 19" casing which contains the servo amplifier for the DC-motor, the signal adaption unit as well as power supplies. A detailed documentation of the system is included in the shipment. The Option 500-02 extends the standard version of the BW500 by an adapter card ready to plug in an IBM-AT-compatible PC with ISA slot and a controller program (MS-WINDOWS). The card provides digital input/output channels, D/A converters output channels as well as input channels for incremental encoder signals. The controller program (Win 3.1 / Win95) allows for a menu-driven operation of the laboratory experiment. |
The control algorithm of the "Practical Program" consists of state feedback with estimation of the beam angular acceleration, estimation of the ball speed and a disturbance observer to suppress the effects of the friction. The parameters of the controller and of the observers are comfortable adjustable. The controller performance is examined by recording the systems response to to changes of the reference and disturbance signals. The signal shapes of the input signals are adjustable as periodic time functions. Measurements of the input and output signals can be represented in a graphic on the PC screen. The graphic ouput of recorded data may be sent to a window. Its content may be printed, saved as a WMF file or copied into the clipboard. The program allows for storing the adjusted or determined parameters of the plant and of the controller in an ASCII file. Those data may be loaded again later on. The Option 500-03 extends the program described with Option 500-02 by a fuzzy controller. This program is useful for learning the concept of a fuzzy control. The comparison of the fuzzy controller with the state feedback controller is easily obtainable by switching the controller mode. The Option 500-05 consists of the C++/Pascal source files with documentation of the PC controller program described with Option 500-02 including library functions for fuzzy operations (ref. Option 500-03) and graphic output. With this option the software may be extended for further studies on i.e. model based fault detection, different observer concepts etc. The Borland C++ compiler version 4.52 as well as Delphi V1.0 are required to generate an executable program. Option 500-06 contains a 13 cm monochome monitor suitable for display of the camera image und for service. The monitor will be delivered with a power supply and a connection cable to the actuator. Technical Data: Dimensions: Length 1160mm, Width 210mm, Height 1025mm Motor data: 24V, 2A, 30W, 9,6Ncm (3000 Rpm) Technical data are subject to change (Date 15-April-1999) |