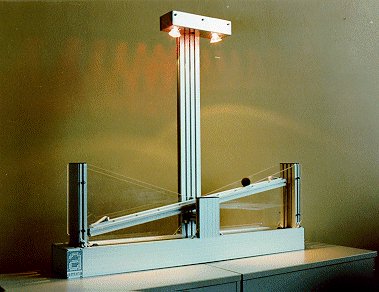
Die nichtlineare Regelstrecke besteht aus einem Ball, der auf einer im Winkel veränderbaren Wippe liegt. Der Ball kann auf einer Stecke von 1m frei über die Wippe rollen. Die Wippe wird über einen Zahnriemen, eine Zahnscheibe und eine Kupplung von einem Gleichstrommotor angetrieben, so daß der Ball an einem vorgebbaren Ort stabilisiert werden kann. Die Stablisierung des Balls wird dadurch erreicht, daá ein digitaler Regler aus den Meßgrößen ein Stellsignal erzeugt, das den Gleichstrommotor über ein elektronisches Stellglied geeignet ansteuert. Als Meßgrößen werden über einen Inkrementaldrehgeber die Wippenstellung und über eine Kamera die Ballposition ermittelt. Das System ist komplett verdrahtet und wird mit nur einer Steckverbindung an die entsprechende Elektronik angeschlossen. Alle sich bewegenden Teile werden von transparentem Acrylglas verdeckt.
In der Grundversion gehört zu dem System BW500 neben dem mechanischen Aufbau ein 19"-Tischgehäuse. In diesem befindet sich das Stellglied für den Motor, die Signalanpassung und Netzteile. Eine ausführliche Dokumentation des Systems gehört ebenfalls zum Lieferumfang.
Die Option 500-02 erweitert die Grundversion des BW500 um eine Einsteckkarte für einen IBM-AT-kompatiblen PC mit ISA-Steckplatz. Die PC-Karte verfügt über digitale I/O-Kanäle, D/A-Wandler und Inkrementalgebereingänge. Das zugehörige WINDOWS-Programm (Win 3.1/ Win 95) wird mit einer PC-Maus und/oder einer Tastatur über Pulldown-Menüs gesteuert. Der Regelalgorithmus des "Praktikums-Programms" beinhaltet eine Zustandsvektorrückführung mit Schätzung der Winkelgeschwindigkeit der Wippe, Schätzung der Ballgeschwindigkeit sowie einen Störgrößenbeobachter zur Schätzung und Unterdrückung der Effekte der Reibung.
Die Option 500-03 erweitert das unter der Option 500-02 beschriebene Programm um einen Fuzzy-Regler. Das Programm erlaubt eine einfache Einarbeitung in das Konzept der Fuzzy-Regelung. Ein Vergleich zwischen der Fuzzy-Regelung und der Regelung durch eine Zustandsvektorrückführung ist durch Umschalten des Reglermodus leicht durchzuführen.
Die Option 500-05 umfaßt den C++/Pascal-Sourcecode mit Dokumentation zu dem Programm aus Opt. 500-02 sowie Bibliotheksroutinen für den Fuzzy-Regler aus Opt. 500-03 und Plotfunktion. Er ermöglicht eine einfache Erweiterung der Software für weitere Studien über z.B.: modellgestützte Fehlerdiagnose, verschiedene Beobachterkonzepte uvm. Die Er- zeugung eines ausführbaren Programms setzt den Borland C++ Compiler V4.52 und Delphi V1.0 voraus.
Die Option 500-06 beinhaltet einen 13cm S/W-Monitor zur Anzeige des Kamerabildes und zu Service-Zwecken. Der Monitor wird mit Netzteiladapter und Verbindungskabel zum Stellglied geliefert.
Technische Daten: Abmessung: Länge 1160mm, Breite 210mm, Höhe 1025mm Motornennwerte: 24V, 2A, 30W, 9,6Ncm (3000 Upm)
Technische Änderungen vorbehalten (Stand: 21.05.1999)